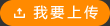
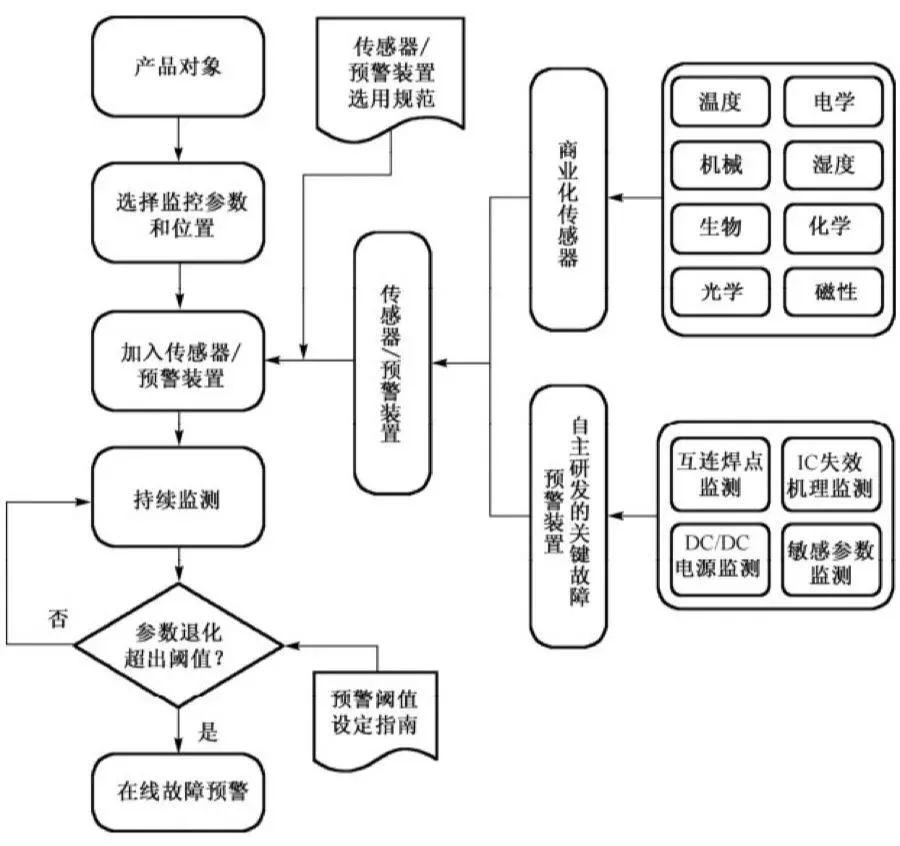
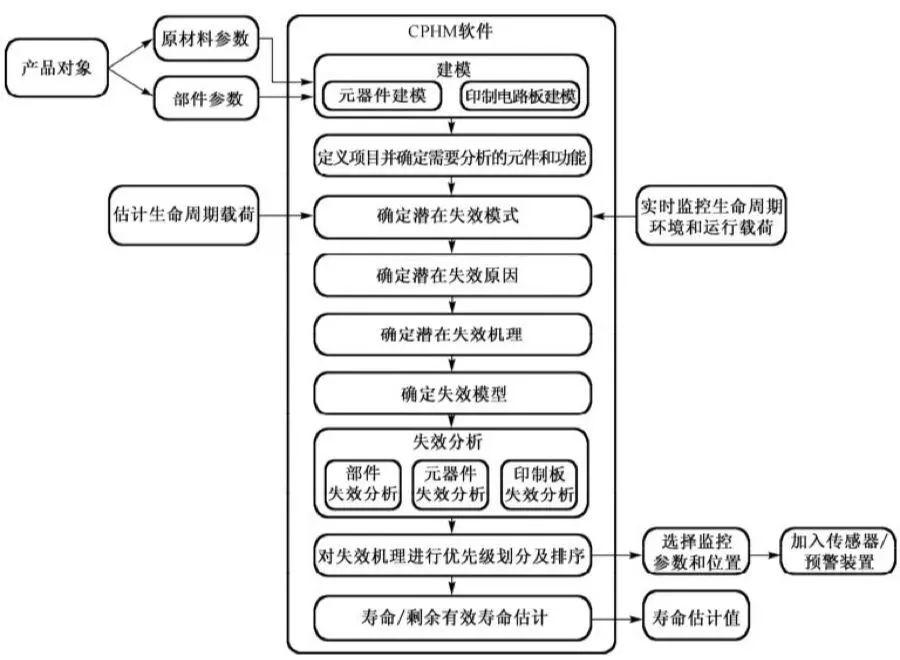
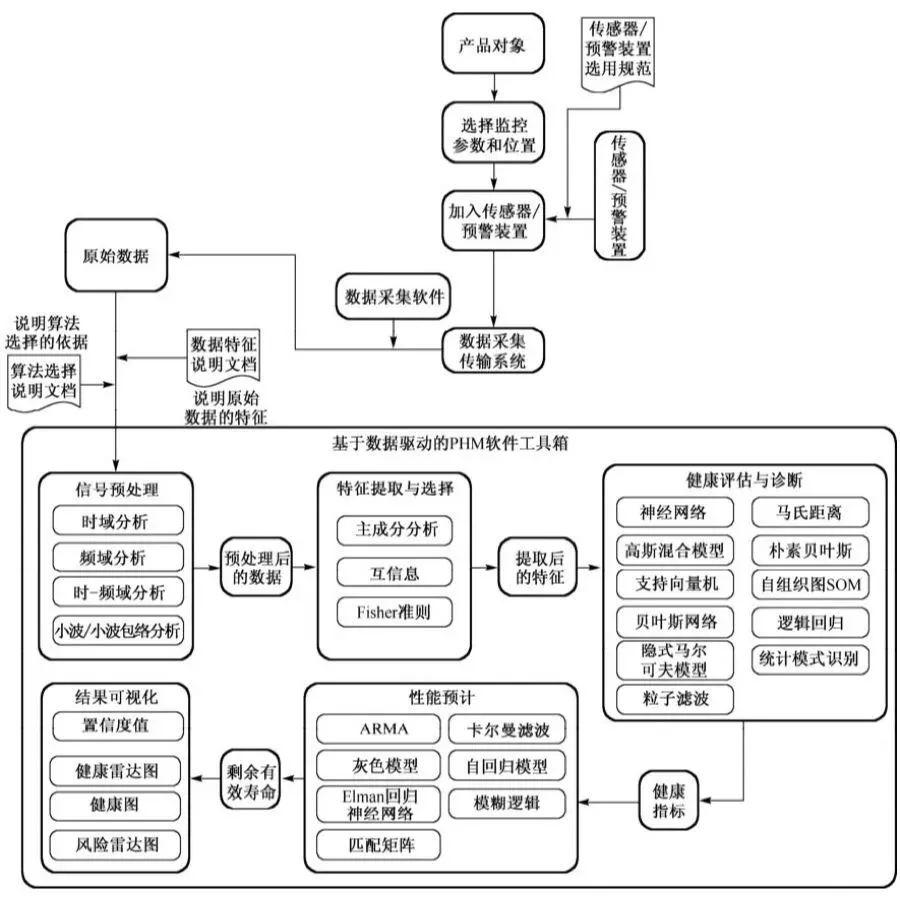
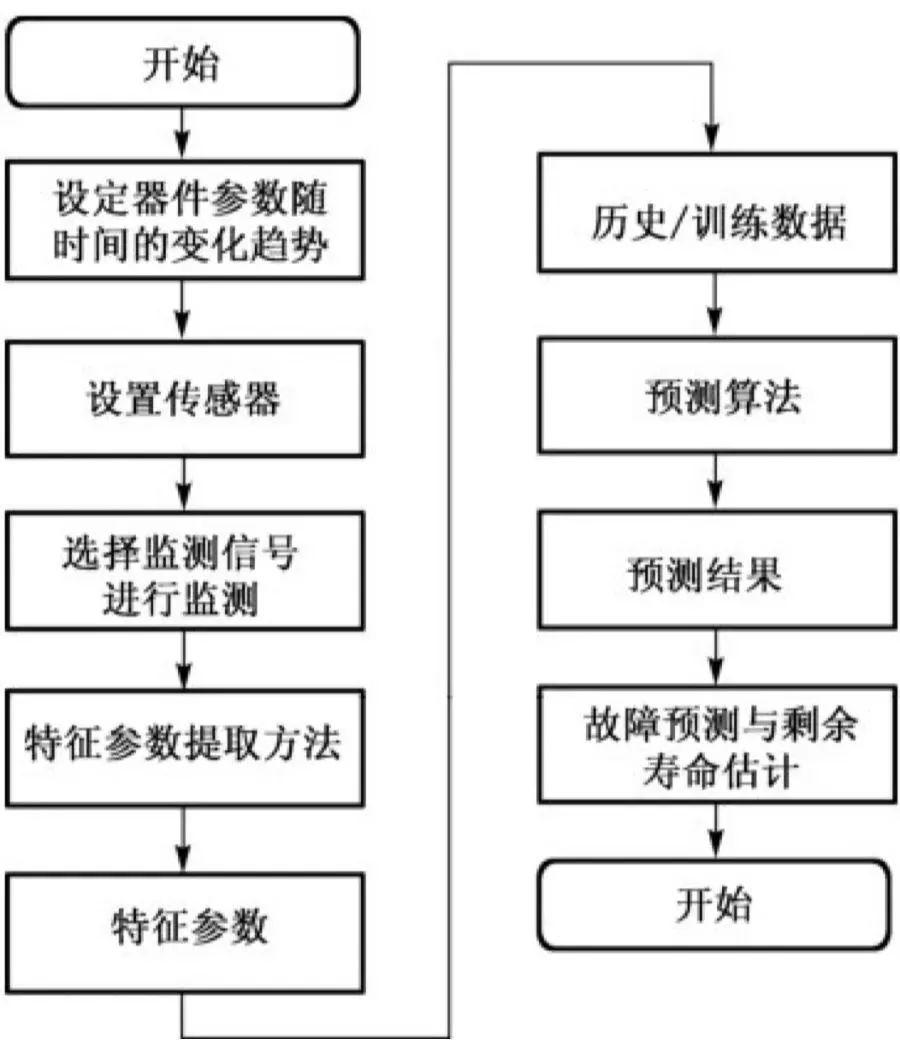
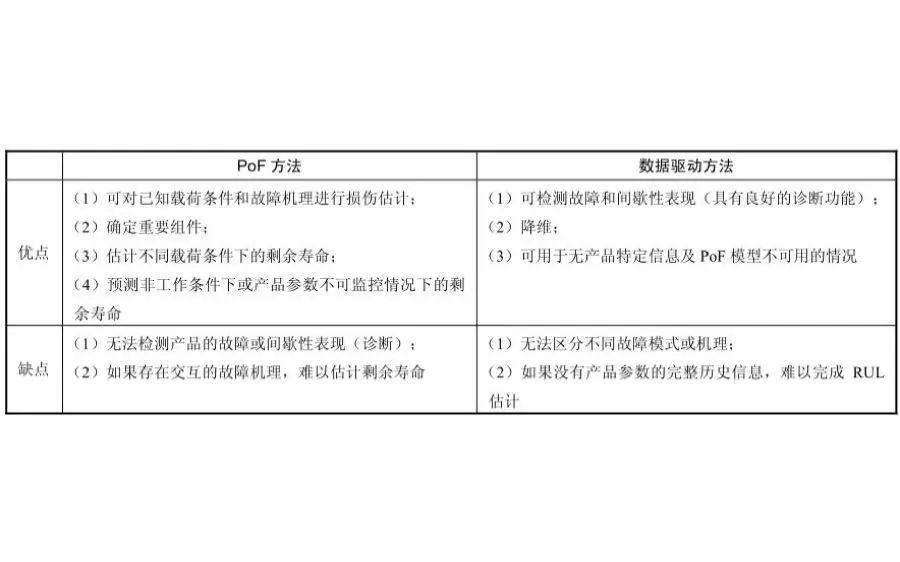
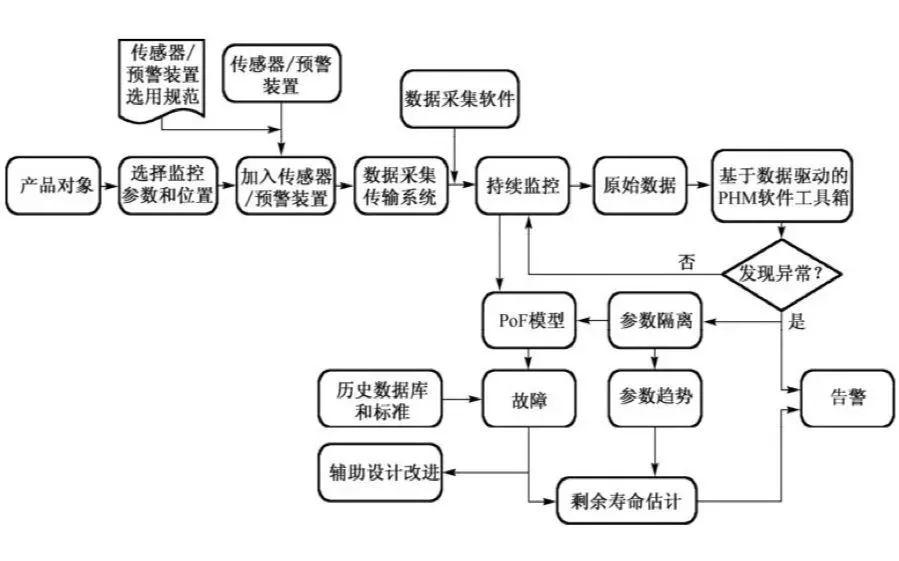
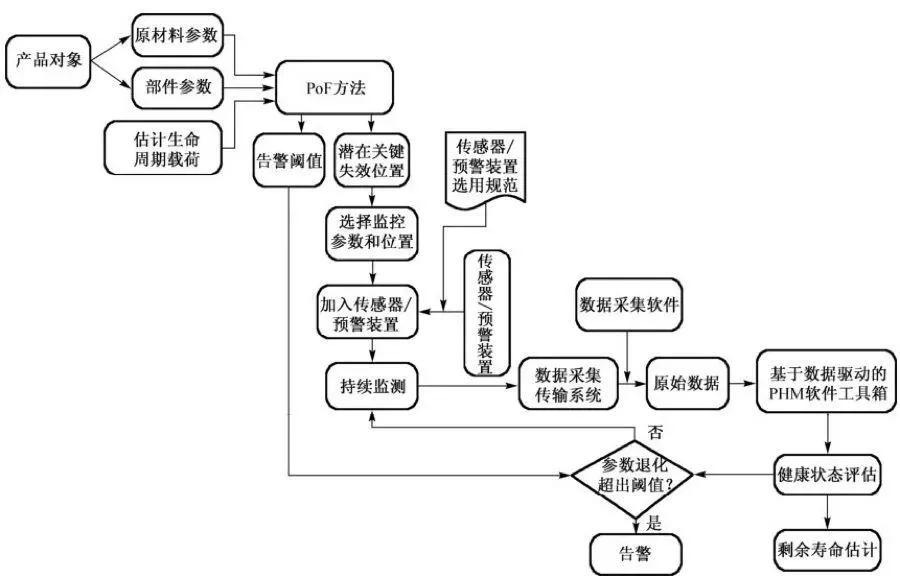
一般的文献中将PHM的方法划分为三大类,基于统计分布的方法,基于数据驱动的方法和基于模型的方法。如下图所示。从工程实际的角度出发,基于统计分布也可归为数据驱动。基于数据驱动和基于模型方法的结合又不失为一种更为优化的方法。所以我们列举如下四种实施方法。一、故障监控与预警方法数据收集是PHM的一个关键部分,且通常需要使用传感器系统来测量环境和运行参数。通过在线监控和分析作为故障预兆的敏感参数的退化情况,如性能参数的退化,并把该退化情况与预先设定的阈值进行比较,可对产品实现在线故障预警。基于传感器系统的PHM方法通用流程如图1所示。除了可以使用现有的商业化传感器外,PHM系统的设计者可能还需要自主研发关键故障的预警装置,如图1中所述的互连焊点监测、IC失效机理监测、DC/DC电源监测等。在实际的工程实践中,基于传感器系统的PHM技术主要用于产品的实际使用阶段,对产品进行在线故障预警。当发生在线故障预警时,产品使用方需要对相关子系统或模块进行维修或更换。图1二、基于失效物理模型的方法基于失效物理(PoF)的PHM技术是利用产品的生命周期载荷和失效机理知识来评估产品可靠性的技术方法。该方法基于对设备、产品或系统的潜在失效机理和失效位置的识别,可为评估新材料、新结构或新产品的可靠性建立一个科学的基础,从而前瞻性地评估其可靠性。基于 PoF 的预测可在系统的实际应用条件下评估和预测其可靠性,它将模型和传感器数据相结合,而该模型能够实时识别产品的当前状态与预期正常运行条件(即产品的“健康状态”)之间的偏离或退化,从而预测产品未来的可靠性状态。在实际的工程实践中,基于失效物理模型的PHM技术主要用于新产品或新系统的研制阶段,帮助研制单位评估产品的寿命/剩余有效寿命;在产品的设计阶段发现并定位其可靠性的“短板”,从而使研制单位可以有针对性地采取措施来提高产品的可靠性。基于PoF的PHM方法通用流程如图2所示。图2基于失效物理(PoF)的CPHM 软件的结构如图3 所示,它以失效模型库、器件模型库、器件生命周期等数据库为基础,还包含不同失效机理所对应的物理模型。一个实际的产品对象利用CPHM软件进行建模后,再将环境应力条件输入该软件中,CPHM软件先针对单一失效机理进行寿命预计,得到单一机理的寿命预计结果,然后通过数据融合与决策机制,可最终得到产品对象的寿命预计结果。图3三、基于数据驱动的方法基于可用的历史信息,从统计和概率角度出发,对系统的健康状况和可靠性进行推断、估计和预测的这种方法被称为基于数据驱动的 PHM 方法。它的基本思想是通过对系统历史信息的学习来掌握健康系统和非健康系统的表现行为的差异,从而实现对系统将来状态的预测。基于数据驱动的PHM 方法通用流程如图4所示。在实际的工程实践中,基于数据驱动的PHM技术主要用在产品的实际使用阶段,它以系统处于“健康”时的数据作为训练数据,以实际使用过程中实时采集到的数据作为测试数据,利用各种统计方法和机器学习的方法对这些数据进行处理和分析,检查测试数据的特征与训练数据的特征之间的退化或差异情况,从而实现对系统健康状况评估、故障诊断及寿命预测。图4基于数据驱动的PHM方法可以实现“在线评估”,也可以实现“离线评估”。当用“在线评估”的方式实现时,需要把数据驱动的算法进行剪裁和优化后固化在嵌入式系统的 CPU、DSP或FPGA中,从而可以实时地利用这些算法对系统健康状况进行评估、诊断与预测;当用“离线评估”的方式实现时,可以把数据驱动的算法实现在计算机或手持式设备中,系统的测试数据定期导入这些算法中,从而实现对系统健康状况的评估、诊断与预测。基于数据驱动的故障预测的关键技术主要包括特征参数提取方法和预测方法。特征参数提取方法是准确获知故障特征的关键技术,而预测方法是获取故障特征参数的变化趋势并对未来时刻进行预测的关键技术。特征参数提取方法主要包括监测信号的选择和特征参数的计算两方面,前者决定了对传感器等信号监测设备的要求,后者则决定了分析计算的空间和时间复杂度。预测方法主要包括算法的选择及其参数的选择,两者直接决定了特征参数变化趋势的准确性及预测数据的可靠性。基于数据驱动的故障预测的流程如图 5所示。首先,根据电路元器件的失效机理,设定其性能参数随时间的变化趋势;接着,根据此趋势设置传感器,然后选择适当的监测信号,根据监测信号与特征参数之间的关系,选择适当的特征提取方法计算特征参数;重复上述过程,监测一段时间内若干时刻点特征参数值,作为预测的训练样本;利用预测算法进行建模,得到特征参数的变化趋势并对未来时刻进行预测;最后,对预测结果进行分析,实现故障预测与剩余寿命估计。图5四、基于融合的方法实施故障预测与健康管理的目的在于检测产品退化和预测无故障工作时间。数据驱动方法利用实时监控的参数数据,而PoF方法则利用对系统的建模进行预测。使用数据驱动和PoF方法开展PHM都有其各自的优势和局限。实际上,可以把PoF与数据驱动技术相结合,这种融合方法可以充分利用每种方法的优势来实现PHM的各种目标,如故障诊断、预测剩余寿命及更加及时和准确地分析故障根源问题等。PoF方法利用产品生命周期载荷条件、几何及材料性质的相关知识来确定潜在故障机理,并估计其剩余有效寿命(RUL)。PoF模型用于针对生命周期载荷条件下的特定故障机理来估计RUL。数据驱动型预测方法利用当前或历史数据,从统计和概率的角度来估计剩余寿命。在产品的运行和环境数据中检测产品的异常、趋势或模式,以确定产品的健康状态,因此该方法需要对环境和运行载荷及产品参数进行实时监控。这两种方法往往单独用于PHM实施,但每种方法都有其各自的优势和局限性,如表1所示。表1用于PHM的融合方法就是将数据驱动方法和PoF方法相结合进行预测,以利用各自的优势来实现PHM系统的所有目标,克服采用单独的某种方法存在的局限性。具体来说,融合方法可分为两种:从数据驱动到PoF的融合方法和从PoF到数据驱动的融合方法。1.从数据驱动到PoF的融合方法数据驱动方法能够提供诊断功能,而 PoF 方法则有助于确定故障根源。先用数据驱动、再用PoF方法的流程如图6所示。该融合方法将数据驱动方法用于异常检测,以检测产品的早期退化,然后将PoF方法用于估计剩余寿命,并确定故障阈值。图62.从PoF到数据驱动的融合方法PoF 方法有助于确定系统的潜在关键失效位置并提供参数的阈值,而数据驱动方法能够进行健康状态评估及剩余寿命预计。先用PoF方法、再用数据驱动的流程如图7所示。该融合方法将 PoF 方法用于确定关键失效位置及故障阈值,将数据驱动方法用于健康评估及剩余寿命预计。图7五、结束语本篇中几种方法的框架和流程,工程实际中很有借鉴意义。本文根据孔学东,恩云飞等老师编著的电子产品故障预测与健康管理改编。往期相关内容:PHM之监控参数获取电子产品故障预测方法综述PHM总体应用技术架构 长按二维码识别关注我们 查看全文